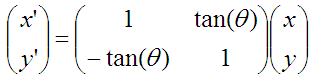
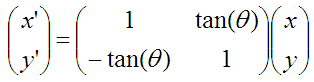
还是给出C语言的实现代码,我们采用循序渐进的方法,先给出浮点数的实现(因为用到了浮点数,所以并没有减少乘法运算量,查找的效率也比二分查找法要低,理论上说这个算法实现很低效。不过这个代码的目的在于给出算法实现的示意性说明,还是有意义的)。
double my_atan4(double x, double y)
{
const double tangent[] = {1.0, 1 / 2.0, 1 / 4.0, 1 / 8.0, 1 / 16.0,
1 / 32.0, 1 / 64.0, 1 / 128.0, 1 / 256.0, 1 / 512.0,
1 / 1024.0, 1 / 2048.0, 1 / 4096.0, 1 / 8192.0, 1 / 16384.0
};
const double angle[] = {45.0, 26.565051177078, 14.0362434679265, 7.1250163489018, 3.57633437499735,
1.78991060824607, 0.8951737102111, 0.4476141708606, 0.2238105003685, 0.1119056770662,
0.0559528918938, 0.027976452617, 0.0
13988227142
27, 0.006994113675353, 0.003497056850704
};
int i = 0;
double x_new, y_new;
double angleSum = 0.0;
for(i = 0; i < 15; i++)
{
if(y > 0)
{
x_new = x + y * tangent[i];
y_new = y - x * tangent[i];
x = x_new;
y = y_new;
angleSum += angle[i];
}
else
{
x_new = x - y * tangent[i];
y_new = y + x * tangent[i];
x = x_new;
y = y_new;
angleSum -= angle[i];
}
printf("Debug: i = %d angleSum = %f, angle = %f, ρ = %f\n", i, angleSum, angle[i], hypot(x, y));
}
return angleSum;
}
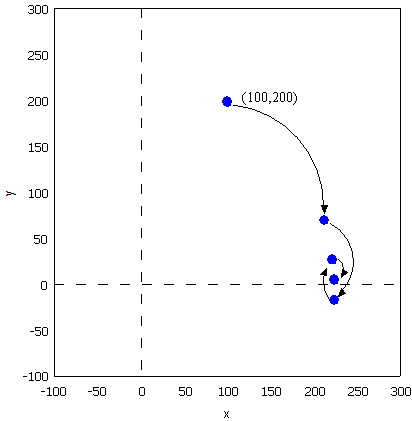
程序运行的输出结果如下:
Debug: i = 0 angleSum = 45.000000, angle = 45.000000, ρ = 316.227766
Debug: i = 1 angleSum = 71.565051, angle = 26.565051, ρ = 353.553391
Debug: i = 2 angleSum = 57.528808, angle = 14.036243, ρ = 364.434493
Debug: i = 3 angleSum = 64.653824, angle = 7.125016, ρ = 367.270602
Debug: i = 4 angleSum = 61.077490, angle = 3.576334, ρ = 367.987229
Debug: i = 5 angleSum = 62.867400, angle = 1.789911, ρ = 368.166866
Debug: i = 6 angleSum = 63.762574, angle = 0.895174, ρ = 368.211805
Debug: i = 7 angleSum = 63.314960, angle = 0.447614, ρ = 368.223042
Debug: i = 8 angleSum = 63.538770, angle = 0.223811, ρ = 368.225852
Debug: i = 9 angleSum = 63.426865, angle = 0.111906, ρ = 368.226554
Debug: i = 10 angleSum = 63.482818, angle = 0.055953, ρ = 368.226729
Debug: i = 11 angleSum = 63.454841, angle = 0.027976, ρ = 368.226773
Debug: i = 12 angleSum = 63.440853, angle = 0.013988, ρ = 368.226784
Debug: i = 13 angleSum = 63.433859, angle = 0.006994, ρ = 368.226787
Debug: i = 14 angleSum = 63.437356, angle = 0.003497, ρ = 368.226788
z = 63.437356
2015年09月20日 06点09分
11