level 3
#define STOP 0#
define FORWARD 1
#define BACKWARD 2#
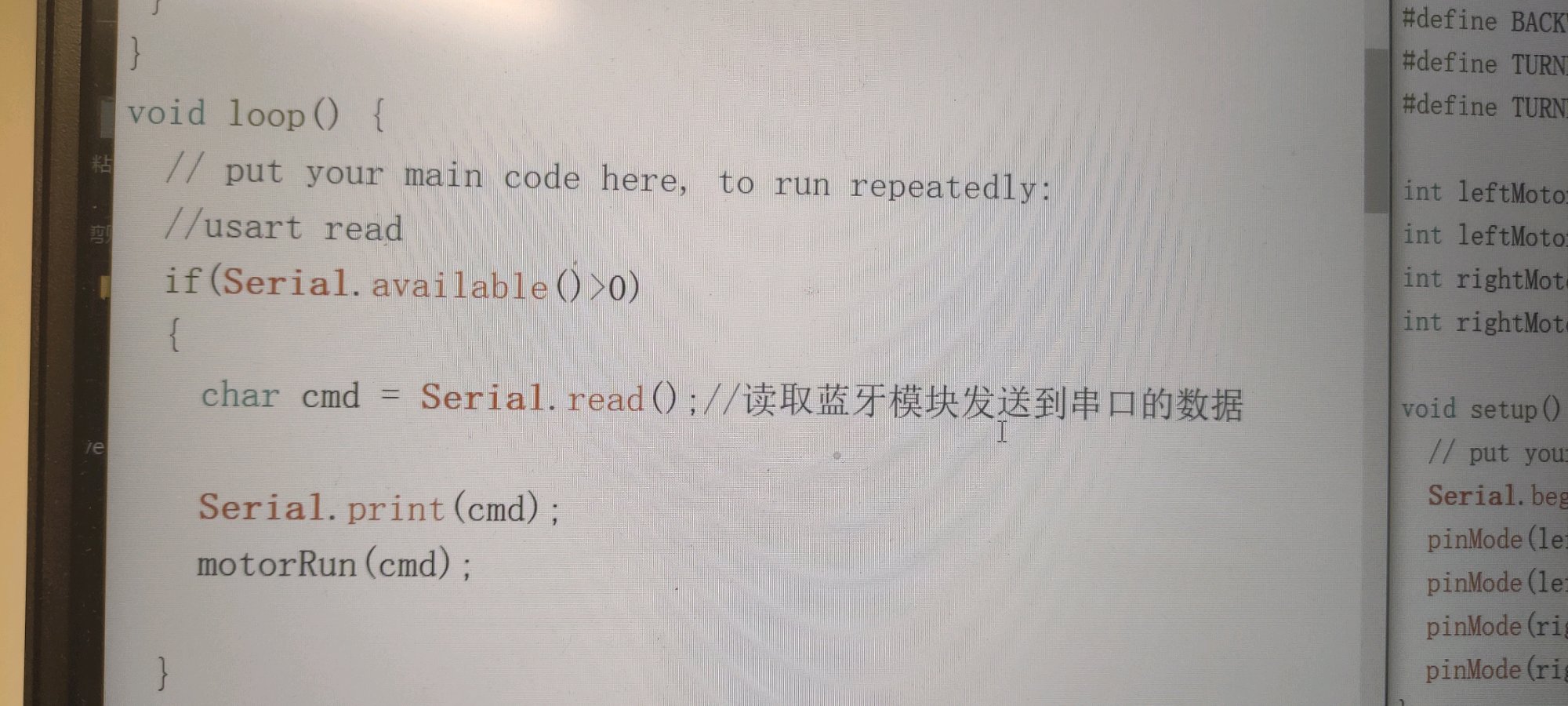
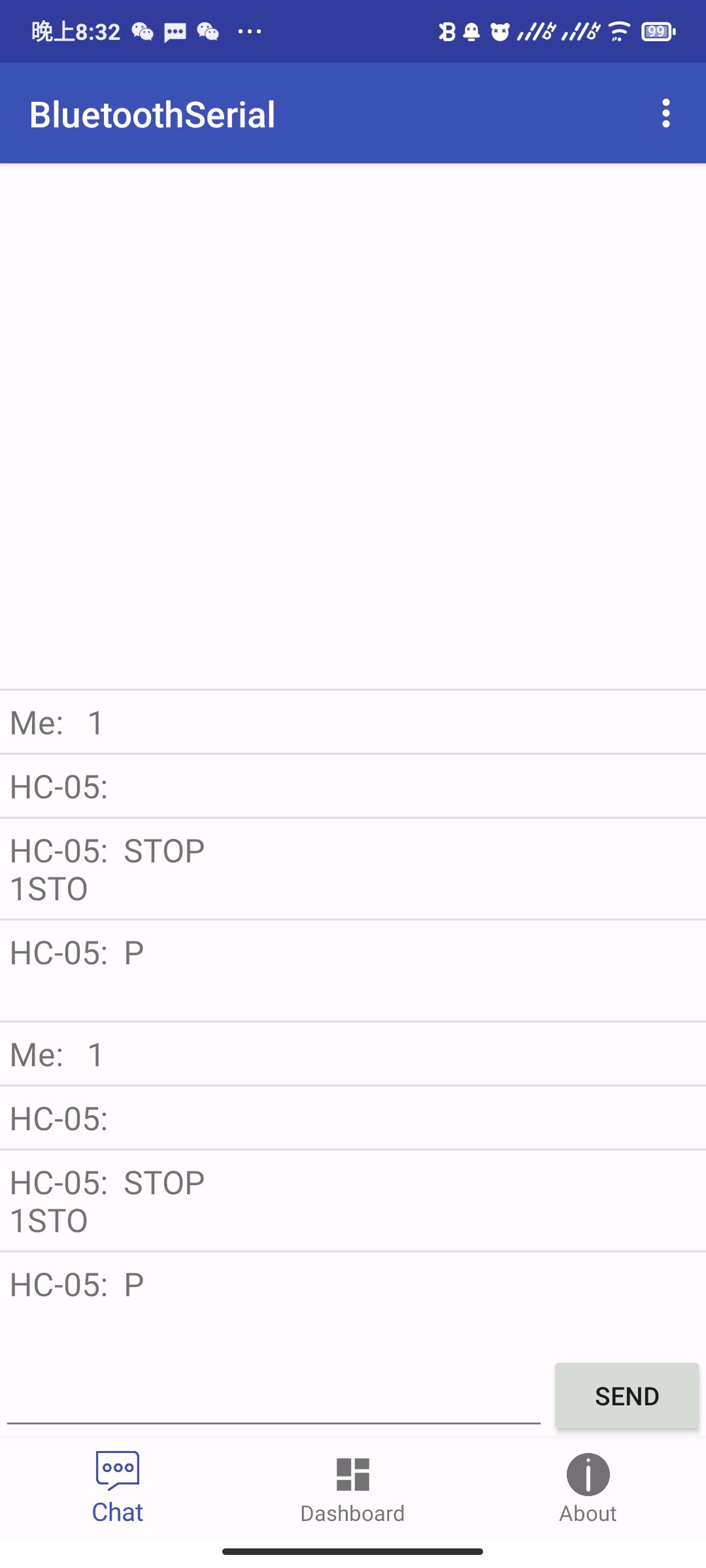
define TURNLEFT 3#define TURNRIGHT 4int lowestPin=2;int highestPin=9;void setup() { Serial.begin(9600); // put your setup code here, to run once:for (int thisPin=lowestPin;thisPin<=highestPin;thisPin++) {pinMode(thisPin,OUTPUT); }}void loop() { // put your main code here, to run repeatedly: //usart read if(Serial.available()>0) { char cmd = Serial.read();//读取蓝牙模块发送到串口的数据 Serial.print(cmd); motorRun(cmd); } }void motorRun(int cmd){ switch(cmd){ case FORWARD: Serial.println("FORWARD"); //输出状态 digitalWrite(2, HIGH); digitalWrite(3, LOW); digitalWrite(4, HIGH); digitalWrite(5, LOW); digitalWrite(6, HIGH); digitalWrite(7, LOW); digitalWrite(8, HIGH); digitalWrite(9, LOW); break; case BACKWARD: Serial.println("BACKWARD"); //输出状态 digitalWrite(2, LOW); digitalWrite(3, HIGH); digitalWrite(4, LOW); digitalWrite(5, HIGH); digitalWrite(6, LOW); digitalWrite(7, HIGH); digitalWrite(8, LOW); digitalWrite(9, HIGH); break; case TURNLEFT: Serial.println("TURN LEFT"); //输出状态 digitalWrite(2, LOW); digitalWrite(3, HIGH); digitalWrite(4, HIGH); digitalWrite(5, LOW); digitalWrite(6, HIGH); digitalWrite(7, LOW); digitalWrite(8, LOW); digitalWrite(9, HIGH); break; case TURNRIGHT: Serial.println("TURN RIGHT"); //输出状态 digitalWrite(2, HIGH); digitalWrite(3, LOW); digitalWrite(4, LOW); digitalWrite(5, HIGH); digitalWrite(6, LOW); digitalWrite(7, HIGH); digitalWrite(8, HIGH); digitalWrite(9, LOW); break; default: Serial.println("STOP"); //输出状态 digitalWrite(2, LOW); digitalWrite(3, LOW); digitalWrite(4, LOW); digitalWrite(5, LOW); digitalWrite(6, LOW); digitalWrite(7, LOW); digitalWrite(8, LOW); digitalWrite(9, LOW); }}
2020年12月09日 13点12分
2