
level 1
kenvin0104
楼主
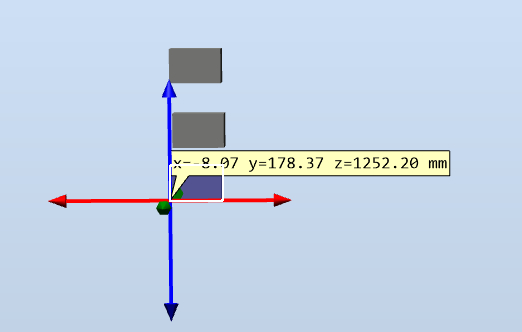
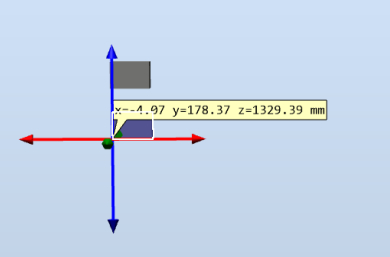
 使用robotstudio仿真输送线,用面传感器的输出来将工件剔出队列,发现工件停止的位置不是固定的,在X方向(工件运动方向)会出现随机的偏差,这样机器人每次抓工件的点就不一样了,要被搞疯了,求大神指点啊!!
使用robotstudio仿真输送线,用面传感器的输出来将工件剔出队列,发现工件停止的位置不是固定的,在X方向(工件运动方向)会出现随机的偏差,这样机器人每次抓工件的点就不一样了,要被搞疯了,求大神指点啊!!
使用robotstudio仿真输送线,用面传感器的输出来将工件剔出队列,发现工件停止的位置不是固定的,在X方向(工件运动方向)会出现随机的偏差,这样机器人每次抓工件的点就不一样了,要被搞疯了,求大神指点啊!!
使用robotstudio仿真输送线,用面传感器的输出来将工件剔出队列,发现工件停止的位置不是固定的,在X方向(工件运动方向)会出现随机的偏差,这样机器人每次抓工件的点就不一样了,要被搞疯了,求大神指点啊!!