现在来讲空陆操作不变的原理
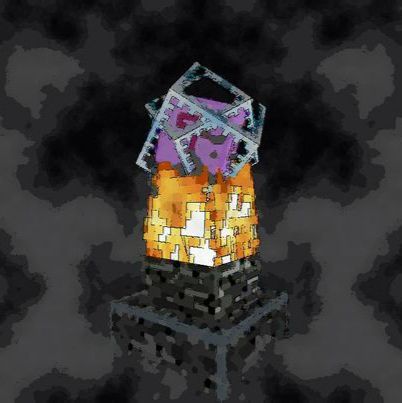
如图是百度能搜索到的四轴的螺旋桨转动方向以及我自己绘制工字车的轮子转动方向,图中序号为轮子编号,以方便理解轮子翻转前后的顺序。
现实中四轴邻位的两个桨转向相反,对位的两桨转向相同,从而抵消桨叶产生的扭矩。把四个桨按图中编号,加速2,4两桨,同时减速1,3两桨,此时升力不变,但由于转速差就产生了一个向左的力矩,使得机体左偏航,右偏航反之亦然。
四轴的前进则是靠加速3,4桨叶,减速1,2桨叶实现前倾,从而前进,其它方向的平移也是同一个道理
如果把四个桨翻转到侧面就成为4个轮子。这时候,由于1,4两桨转向相反,前进键对应的1桨减速4桨加速在陆地上就表现为向前旋转,这个地方如果听不懂可以看图中四轴与工字车的对应序号,然后自己进行思想实验测试一下,实在不明白就打开bsg直接实验。
同理,偏航键对应的2,4桨加速1,3桨减速在工字车上就表现为2像前滚动而4向后滚动,实现差速转向,1,3两轮子也是一样的动作。空间感不好的同志一定要打开bsg找着实验一下。
实际建造中,每一个动作都是4组发动机协调完成的,在飞行模式还加了侧平移的按键以方便调整飞行器姿态






![[滑稽]](/static/emoticons/u6ed1u7a3d.png) 小板凳
小板凳

![[阴险]](/static/emoticons/u9634u9669.png)