大家好,Robotstudio教程和其他的一些分享
robotstudio吧
全部回复
仅看楼主
level 7
左手紧握右手放
楼主
2018年03月19日 06点03分
1
level 7
左手紧握右手放
楼主
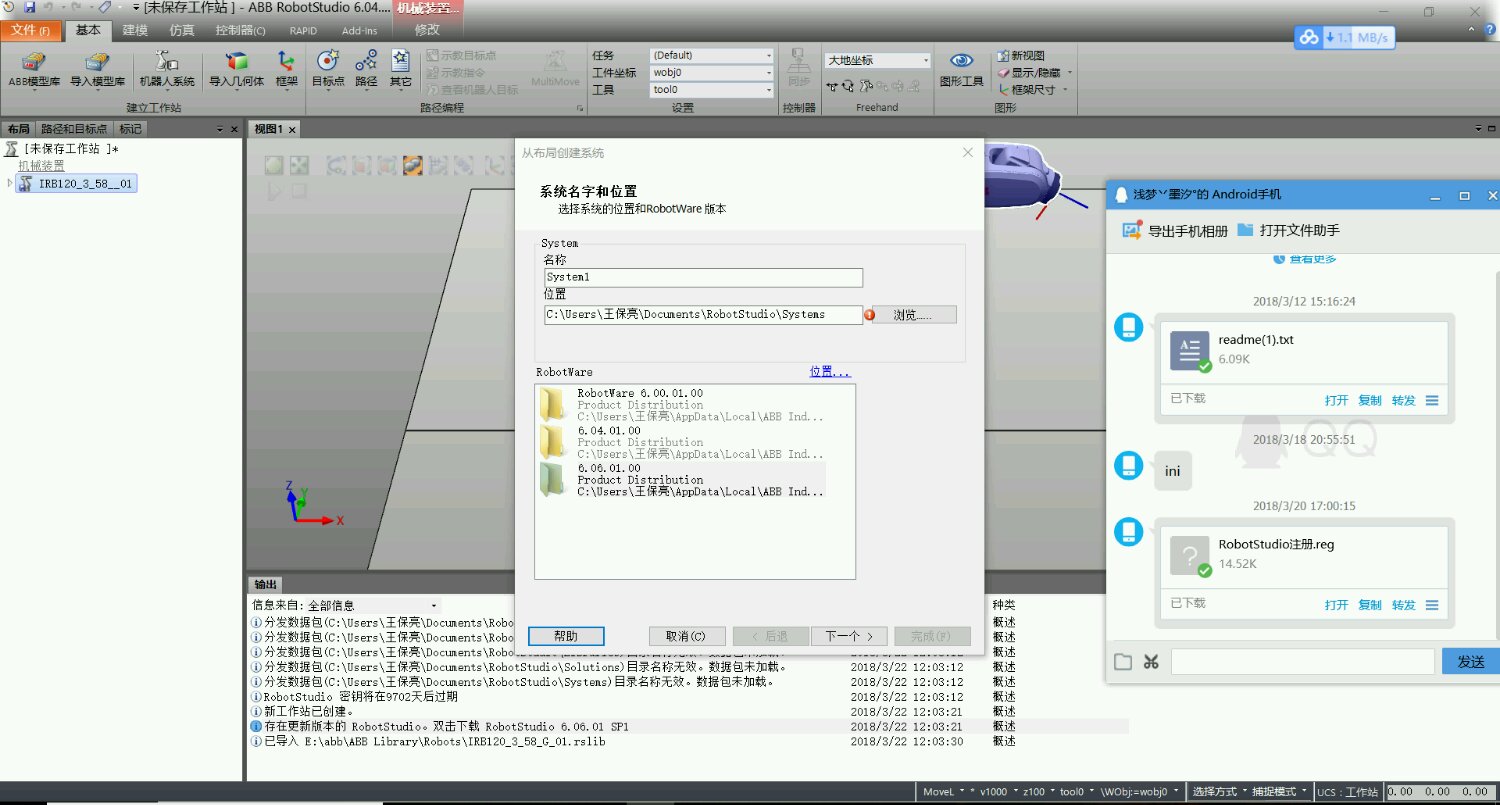
1.1创建系统
2018年03月19日 06点03分
2
左手紧握右手放
ROBOTEDU
2018年03月19日 06点03分
左手紧握右手放
公众号
2018年03月19日 06点03分
左手紧握右手放
更新的教程会在公众号放出
2018年03月19日 06点03分
左手紧握右手放
有问题的同学可以直接在公众号后面留言或者在帖子里@我,上班时间可能回复比较慢
2018年03月19日 13点03分
level 7
左手紧握右手放
楼主
h切换视角操作ttps://gss3.baidu.com/6LZ0ej3k1Qd3ote6lo7D0j9wehsv/tieba-smallvideo-transcode/19788848_032d78a3f9a816978484869627ced986_a824a58b612d_1.mp4,贴吧好像禁止在视频贴下面继续贴视频,暂时先这样操作,以后再做改善
2018年03月20日 02点03分
14
左手紧握右手放
去掉开头字,复制粘贴地址,可观看视频
2018年03月20日 02点03分
level 7
左手紧握右手放
楼主
@呆萌少年wbl
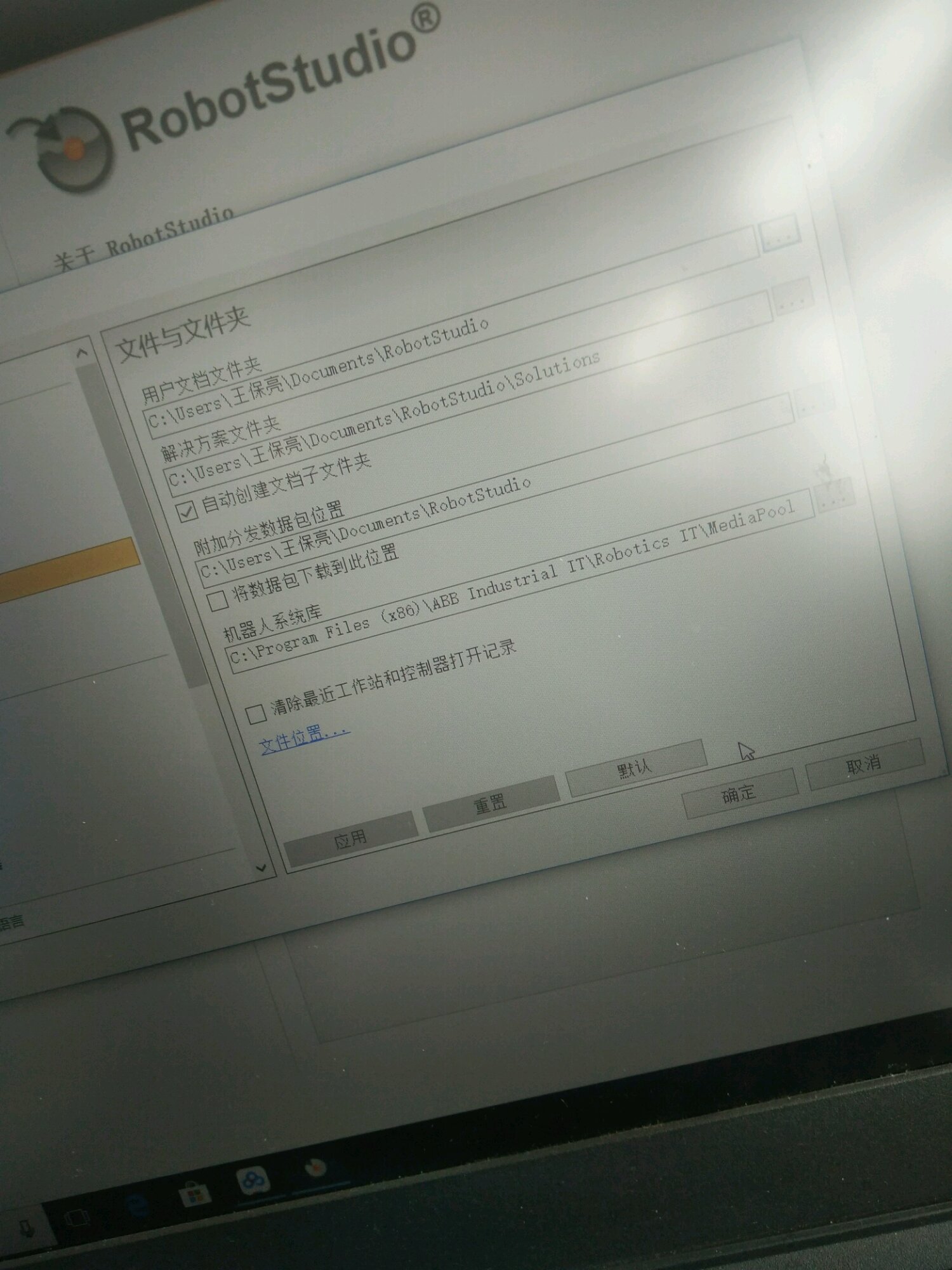
无法创建系统请查看你软件安装目录是否有中文或者其他非法字符
2018年03月21日 01点03分
15
左手紧握右手放
@呆萌少年wbl
2018年03月21日 01点03分
level 3
呆萌少年wbl
能留个微信吗
2018年03月21日 15点03分
16
左手紧握右手放
现在度娘什么都不让发ROBOTEDU
2018年03月22日 02点03分
gxh851230682
@左手紧握右手放
在注册表里面 按 Ctrl + F 搜索 可以找到SLP Services 但是里面没有 NoLockData 数据。。。
2022年05月28日 10点05分
level 7
左手紧握右手放
楼主
2018年03月22日 02点03分
18
level 7
左手紧握右手放
楼主
h快速放置ttps://gss3.baidu.com/6LZ0ej3k1Qd3ote6lo7D0j9wehsv/tieba-smallvideo-transcode/14622610_1eb3bb1c3f2e5fc66480ea26b947cc9b_3d5c4f0d5bca_1.mp4
2018年03月22日 02点03分
19
level 3
呆萌少年wbl
就是这个问题
2018年03月22日 05点03分
20
左手紧握右手放
你的系统目录有中文了啊,王宝亮......
2018年03月22日 06点03分
呆萌少年wbl
@左手紧握右手放
2018年03月22日 06点03分
拾荒⛅
兄弟**了,和我一样注册电脑账户用了自己的名字
2018年03月28日 13点03分
雨打潇湘
@左手紧握右手放
这该怎么办呢 账户名字改了软件卸载重装也是中文名字 还缺少组件
2022年03月08日 14点03分
level 3
呆萌少年wbl
你是说位置哪里吗
2018年03月22日 06点03分
21
左手紧握右手放
是的
2018年03月22日 06点03分
呆萌少年wbl
能加个微信啦
2018年03月22日 06点03分
左手紧握右手放
@呆萌少年wbl
Wechat上搜ROBOTEDU
2018年03月22日 07点03分
呆萌少年wbl
@左手紧握右手放
还是不能创建系统
2018年03月22日 08点03分
level 7
左手紧握右手放
楼主
h机器人回原点与机械原点设置ttps://gss3.baidu.com/6LZ0ej3k1Qd3ote6lo7D0j9wehsv/tieba-smallvideo-transcode/12365037_003706f28221e494441ee892f26cad89_d15cfdda5258_1.mp4
2018年03月23日 01点03分
22
level 2
好事萝卜
请问老师:要自学焊接机器人操作工,用这个软件能达到实际操作的目的吗?
本人有auto-cad,和proe,以及焊接和数控切割基础。
2018年03月25日 11点03分
24
左手紧握右手放
不行的,这个软件,最多就是教你ABB机器***作与编程,没办法实现焊接的仿真效果。很多机器人焊接的参数要靠实际情况来调节的
2018年03月25日 23点03分
好事萝卜
谢谢老师。我有十多年的手工焊接基础,焊接可以省略。我想了解的是机器人操作,和编程,以及abb机器人,和一些国产机器***作是否相同。
2018年04月02日 13点04分
好事萝卜
做机器人操作,薪资待遇怎么样
2018年04月02日 13点04分
左手紧握右手放
@好事萝卜
待遇肯定比传统焊接行业要高,机器人编程大同小异,具体我也不清楚,你可以去找找行业内的人问问,机器人焊接最重要的是焊接参数的调节你有手工焊经验调节参数的时候有优势
加油
2018年04月03日 02点04分
level 1
lwb025
请问一下,在仿真中机器人的机械臂空转时间太长怎么调(比如沿着一条曲线运动,但在中途某个地方几乎不行走,机械臂一直在空转,转过一定角度后才沿着轨迹继续行走)
2018年04月02日 01点04分
26
左手紧握右手放
空转是机器人在调整姿态,你说的这种情况,最好的方法是修改空转位置点工具的姿态,
2018年04月02日 02点04分
左手紧握右手放
@lwb025
是的
2018年04月02日 03点04分
lwb025
@左手紧握右手放
有这样可以调整空转的命令吗,这样没有目标的一个个角度的去调试太费时了
2018年04月02日 03点04分
左手紧握右手放
@lwb025
你可以统一所有目标点的姿态
2018年04月02日 04点04分
level 1
lwb025
请问一下速度参数里面vlin100,vrot100和vmax分别是什么意思?
2018年04月06日 02点04分
27
左手紧握右手放
vlin100是线性移动外轴
2018年04月06日 08点04分
左手紧握右手放
@左手紧握右手放
Vrot是线性旋转外轴
2018年04月06日 08点04分
左手紧握右手放
@左手紧握右手放
vmax是以最大速度移动TCP
2018年04月06日 09点04分
lwb025
@左手紧握右手放
为什么我使用vrot或vlin时提示速度太小?这里的线型外轴具体指什么,设么时候可以使用vlin和vrot呢?
2018年04月06日 09点04分
level 1
lwb025
如果机器人控制有负重的工具做曲线匀变速运动时,加速度的控制命令用pathAccLim命令还是WorldAccLim命令呢?
2018年04月06日 09点04分
28
左手紧握右手放
pathAcclim
2018年04月06日 09点04分
lwb025
@左手紧握右手放
那什么时候用WorldAccLim呢?
2018年04月06日 10点04分
左手紧握右手放
@lwb025
不针对路径得时候
2018年04月06日 12点04分
lwb025
@左手紧握右手放
那pathAcclim不是指的是TCP处的加速度大小吗?如果是带负重的工具,用这个命令也可以 精确地模拟实际工具的加速度吗?
2018年04月06日 12点04分
level 1
lwb025
当工具运行到转角点时,速度往往锐减到很小,达不到理想的速度值,有没有什么命令可以使工具按理想的速度在该点运行(通过信号分析,比如在转角点需要的速度是100,但在仿真时由于是转角,瞬间减小到10,怎么能保证在该点处的速度大小是需要的100呢)
2018年04月06日 09点04分
29
左手紧握右手放
编程中目标点位置的到达方式有两种:一种是停止点,一种是飞跃点。通过ZONEDATA来实现,其实不是减少到10 是减少到了0。飞跃点可以保证速率不受影响但是机器人在转角点不会精确到目标点
2018年04月06日 10点04分
lwb025
@左手紧握右手放
zonedata就是Z10,z20这些参数吗?
2018年04月06日 10点04分
左手紧握右手放
@lwb025
是的
2018年04月06日 12点04分
lwb025
@左手紧握右手放
奥,多谢啦
2018年04月06日 12点04分
1
2
3
尾页
![[呵呵]](/static/emoticons/u5475u5475.png)




![[吐舌]](/static/emoticons/u5410u820c.png) 现在度娘什么都不让发ROBOTEDU
现在度娘什么都不让发ROBOTEDU