level 8
蓝色世界树
楼主
一、作品简介
1.作品外观
 2.研究背景
2.研究背景
研究目的及意义
生活是向着智能化,便捷化的方向发展。而在交通和环境问题日益突出的当今,作为适合多种场合使用的代步工具,平衡车顺应了时代的潮流,具有使用简单、节能环保、移动灵敏便捷等特点,尤其在空间狭窄、急转角度大的工作场合作业优势更凸显。作为一个非线性的对称系统,具有强耦合、多变量、参数不确定等特性。其原理和传统的倒立摆系统类似,本身是一个自然重心不稳定的物体,需要电机的控制来维持姿态的平衡,通过姿态传感器、控制算法、微控制器数据拟合驱动电机转动及车体机械集装配置整体协调制衡,是集环境感知、姿态检测、动态规划与决策、行为控制与执行等多种功能于一体的非线性系统,其控制难度大,控制算法复杂,给自动控制理论体系提出了很大的挑战,具有较强的理论研究和实践价值。
3.作品亮点
双轮载人平衡车采用无污染的电能作为动力,具备体积小、运动灵活、停车方便、狭小地方作业能力强等特点,针对当今社会交通拥挤、汽车尾气污染等问题提出了新型的出行方式解决方案。便捷、智能、迷你实用、纯绿色的平衡车既可以有效的解决中短距离的交通问题,又能健身娱乐,得到了广大群众的拥护和喜好。同时,自平衡车作为高度灵敏的非线性不稳定体,具有强耦合、欠驱动等特征,是研究自控技术及理论的绝佳实验平台。
设计中充分分析了自平衡技术的工作及控制原理,运用了经典的牛顿力学建立载人平衡车的动力学与运动学模型,参考倒立摆的运动设计了自平衡控制算法。对系统的可控角度、最大爬坡角度、可控性、可观测性进行了分析,得到了载人平衡车设计的指导性结论。通过对编码器与姿态传感器的数据融合,获得了实时的、低噪声的车身倾角信息与电机转动速度信息,采用双闭环控制算法调整PWM占空比控制电机转动实现了车身的原地平衡直立、前行后退、转向等功能。
实测结果表明,本文所设计的载人平衡车能够很好的实现自平衡并且稳定的运行,其快恢复性,准确性和稳定性能良好。
需要详细资料学习的请看原贴:http://club.szlcsc.com/article/details_7509_1.html
二、系统架构图
设计要求
1、设计车体硬件,主要包括车体重心设计、电子元器件位置摆放,电气布线等,力求车体简洁美观;
2、电路设计,主要包括控制模块、稳压电源模块、双轮测速模块、电机驱动模块,保证电子元器件之间不会出现电磁信号干扰;
3、设计电机速度控制算法,实现稳定、可靠地车体平衡直立、前进后退以及转向三个功能;
要求:
(1)可实现载人原地平衡直立,前进后退;
(2)平坦道路上可安全、平稳行驶;
(3)设计双闭环控制算法;
(4)可爬坡20°以上;
(5)低速行驶状态下可安全通过路面减速带;
(6)大功率高亮LED前后车灯,方便晚上行驶;
(7)实时车速显示;
(8)最大载重80KG以上,续航20KM,最高时速10KM/H;
(9)倾角过大,转速过高或失控等,发出相对应提示;
载人平衡车建模和控制策略
载人平衡车工作原理
自平衡车是建立在基于动态平衡的自动控制系统上的一种高度灵敏、快恢复的非线性系统。而载人平衡车则是建立在自平衡的基础之上,与人体操作相融合的高度协调的“思维车”。相较于一般的自平衡小车而言,载人平衡车具备更高的抗干扰能力和更快速的自平衡恢复能力。车身内置高精度、高速的姿态传感器实时监测车体倾斜角度,并通过数字滤波算法与电机测速的编码器数据相融合,根据接收到的倾斜角与加速度信息,中央控制器随即的做出相应的判断指令并输出频率固定、动态可调幅度的PWM波以驱动电机转动去维持系统的平衡。通过采集把手带动转向电位器转过的模拟值,判断在当前行进速度下安全平稳转弯的角度大小,达到稳定、灵活的行进。
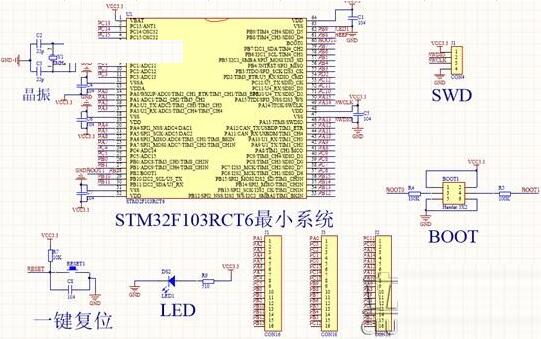
系统组成
综合以上所叙述的,选择STM32F103C8T6单片机作为主控芯片,MPU-6050姿态传感器,直流有刷减速电机,大功率H全桥电机驱动器组成双轮载人平衡车硬件系统。辅以卡尔曼滤波算法对陀螺仪和加速度计数据进行融合,计算出车身倾角与角速度的最优估计值。并以最优姿态角和车身速度作为反馈量构成双闭环控制反馈回主控制系统中产生两路动态可调的PWM波驱动电机前后转动以维持车身的平衡与直立。

2017年10月10日 07点10分
1
1.作品外观
2.研究背景研究目的及意义
生活是向着智能化,便捷化的方向发展。而在交通和环境问题日益突出的当今,作为适合多种场合使用的代步工具,平衡车顺应了时代的潮流,具有使用简单、节能环保、移动灵敏便捷等特点,尤其在空间狭窄、急转角度大的工作场合作业优势更凸显。作为一个非线性的对称系统,具有强耦合、多变量、参数不确定等特性。其原理和传统的倒立摆系统类似,本身是一个自然重心不稳定的物体,需要电机的控制来维持姿态的平衡,通过姿态传感器、控制算法、微控制器数据拟合驱动电机转动及车体机械集装配置整体协调制衡,是集环境感知、姿态检测、动态规划与决策、行为控制与执行等多种功能于一体的非线性系统,其控制难度大,控制算法复杂,给自动控制理论体系提出了很大的挑战,具有较强的理论研究和实践价值。
3.作品亮点
双轮载人平衡车采用无污染的电能作为动力,具备体积小、运动灵活、停车方便、狭小地方作业能力强等特点,针对当今社会交通拥挤、汽车尾气污染等问题提出了新型的出行方式解决方案。便捷、智能、迷你实用、纯绿色的平衡车既可以有效的解决中短距离的交通问题,又能健身娱乐,得到了广大群众的拥护和喜好。同时,自平衡车作为高度灵敏的非线性不稳定体,具有强耦合、欠驱动等特征,是研究自控技术及理论的绝佳实验平台。
设计中充分分析了自平衡技术的工作及控制原理,运用了经典的牛顿力学建立载人平衡车的动力学与运动学模型,参考倒立摆的运动设计了自平衡控制算法。对系统的可控角度、最大爬坡角度、可控性、可观测性进行了分析,得到了载人平衡车设计的指导性结论。通过对编码器与姿态传感器的数据融合,获得了实时的、低噪声的车身倾角信息与电机转动速度信息,采用双闭环控制算法调整PWM占空比控制电机转动实现了车身的原地平衡直立、前行后退、转向等功能。
实测结果表明,本文所设计的载人平衡车能够很好的实现自平衡并且稳定的运行,其快恢复性,准确性和稳定性能良好。
需要详细资料学习的请看原贴:http://club.szlcsc.com/article/details_7509_1.html
二、系统架构图
设计要求
1、设计车体硬件,主要包括车体重心设计、电子元器件位置摆放,电气布线等,力求车体简洁美观;
2、电路设计,主要包括控制模块、稳压电源模块、双轮测速模块、电机驱动模块,保证电子元器件之间不会出现电磁信号干扰;
3、设计电机速度控制算法,实现稳定、可靠地车体平衡直立、前进后退以及转向三个功能;
要求:
(1)可实现载人原地平衡直立,前进后退;
(2)平坦道路上可安全、平稳行驶;
(3)设计双闭环控制算法;
(4)可爬坡20°以上;
(5)低速行驶状态下可安全通过路面减速带;
(6)大功率高亮LED前后车灯,方便晚上行驶;
(7)实时车速显示;
(8)最大载重80KG以上,续航20KM,最高时速10KM/H;
(9)倾角过大,转速过高或失控等,发出相对应提示;
载人平衡车建模和控制策略
载人平衡车工作原理
自平衡车是建立在基于动态平衡的自动控制系统上的一种高度灵敏、快恢复的非线性系统。而载人平衡车则是建立在自平衡的基础之上,与人体操作相融合的高度协调的“思维车”。相较于一般的自平衡小车而言,载人平衡车具备更高的抗干扰能力和更快速的自平衡恢复能力。车身内置高精度、高速的姿态传感器实时监测车体倾斜角度,并通过数字滤波算法与电机测速的编码器数据相融合,根据接收到的倾斜角与加速度信息,中央控制器随即的做出相应的判断指令并输出频率固定、动态可调幅度的PWM波以驱动电机转动去维持系统的平衡。通过采集把手带动转向电位器转过的模拟值,判断在当前行进速度下安全平稳转弯的角度大小,达到稳定、灵活的行进。
系统组成
综合以上所叙述的,选择STM32F103C8T6单片机作为主控芯片,MPU-6050姿态传感器,直流有刷减速电机,大功率H全桥电机驱动器组成双轮载人平衡车硬件系统。辅以卡尔曼滤波算法对陀螺仪和加速度计数据进行融合,计算出车身倾角与角速度的最优估计值。并以最优姿态角和车身速度作为反馈量构成双闭环控制反馈回主控制系统中产生两路动态可调的PWM波驱动电机前后转动以维持车身的平衡与直立。