第一,关于平面与球面的转化问题,我采用了直接转换方式,即,距离角度直接换算方式,将长宽与XY轴的进行等比例处理,比如球面的一周为360度,我的42步进200脉冲一周,(二分法支持400步,用细分驱动器可以更细致),因此,只要图片的长或宽的像素与XY轴一周的步进数相同,图片上每一点就都可以在球面用两个角度进行表达,(球面整体可认为是一个正方形图片的扭曲)
第二,输出色彩只有1种,图片进行灰度处理后变成一个充满0和1的矩阵,通过判断0和1进行绘制,机器的工作过程类似于CRT显示器的扫描,最简单的绘图方式便是打点绘制,形成类似于下图的效果,
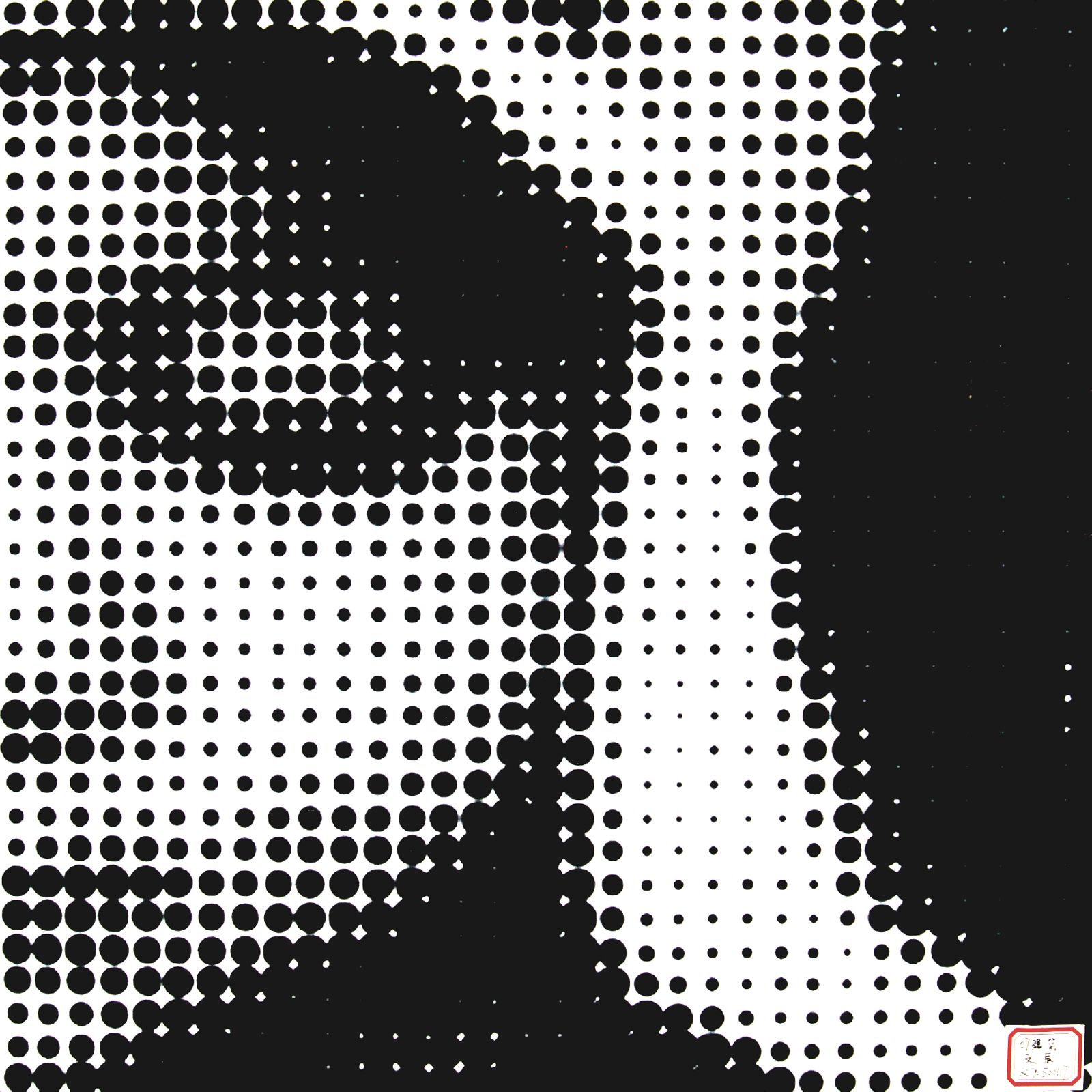

当然,通过算法优化,可以尽力避免纯点阵的图片,不过该种方式形成矢量文字等效果不好,当然,我会设法在后期进行完善。



















![[惊哭]](/static/emoticons/u60cau54ed.png)




![[haha]](/static/emoticons/haha.png)
![[乖]](/static/emoticons/u4e56.png)
![[胜利]](/static/emoticons/u80dcu5229.png)
![[滑稽]](/static/emoticons/u6ed1u7a3d.png)