sailor_lqx
sailor_lqx
关注数: 2
粉丝数: 24
发帖数: 23
关注贴吧数: 6
【教程】新版MeArm四轴机械臂的安装(转载) 图片太多发不上来,直接看原文:http://tieba.baidu.com/mo/q/checkurl?url=http%3A%2F%2Fwww.7gp.cn%2Findex.php%2Farchives%2F242&urlrefer=d6c252c1d775ecca81524258db415059本文来自http://tieba.baidu.com/mo/q/checkurl?url=http%3A%2F%2Fwww.7gp.cn%2Findex.php%2Farchives%2F242&urlrefer=d6c252c1d775ecca81524258db415059
【教程】基于Arduino的四轴小机械臂搭建教程 图片太多,发不上来,原文地址:http://tieba.baidu.com/mo/q/checkurl?url=http%3A%2F%2Fwww.7gp.cn%2Findex.php%2Farchives%2F242&urlrefer=d6c252c1d775ecca81524258db415059本文来自http://tieba.baidu.com/mo/q/checkurl?url=http%3A%2F%2Fwww.7gp.cn%2Findex.php%2Farchives%2F242&urlrefer=d6c252c1d775ecca81524258db415059
【教程】新版MeArm四轴机械臂的安装(转载) MeArm机械臂安装(V1.0版) 由Lien发表于 2016年2月20日 本文来自http://tieba.baidu.com/mo/q/checkurl?url=http%3A%2F%2Fwww.7gp.cn%2Findex.php%2Farchives%2F242&urlrefer=d6c252c1d775ecca81524258db415059 我们将在这里介绍最新版MeArm V1.0机械臂的安装方法。之前我们曾介绍过MeArm V0.4版本的安装方法(点击这里查看)。V1.0跟之前版本的最大区别就是使用了内六角螺丝,尺寸也比V0.4版的大,总体看起来更专业,结构更合理。Step 1: 先把零部件摆一摆!Step 2: 把舵机进行初始化校验 在我们安装之前,需要对舵机做个校验和设置初始角度。舵机通过PWM信号控制其旋转角度,通过 Arduino, Raspberry Pi, Beaglebone Black, Sparkcore 或者Espruino都可以对舵机进行控制。4个舵机对应底座、左边、右边、钳爪的初始角度分别为90度、90度、90度和25度。详细步骤请看下面。 Step 3: 开始 注:舵机角度为90度这部分很简单,根据上图搭建就好了,需要说明的是:底座的四根螺丝是20mm或者25mm的螺丝,固定舵机的2枚螺丝是8mm(凡是安装在舵机两边的固定螺丝都选用8mm的)。 Step 4: 左边摇臂 注:舵机初始角度为90度Step 5: 右边摇臂 注:参照下图,舵机要旋转90度,再把摇臂安装上去。注:下图左上角的螺丝长度为6mm。Step 6: 搭建中间底座注:下图螺丝长度为10mmStep 7: 合并左边配件 注:下图的螺丝为12mm,不要把螺丝拧太紧,否则容易使亚克力配件断裂。 Step 8: 卡入右边配件 注:下图需要的螺丝长度为12mm Step 9: 完成底座的安装注:下图需要2颗6mm的螺丝 Step 10: 右前臂 注:下图需要1枚6mm的螺丝和2枚10mm的螺丝Step 11: 搭建钳爪 注:下图需配螺丝为12mm螺丝1枚、6mm螺丝2枚、8mm螺丝6枚。 注:舵机初始角度在25度左右Step 12: 将钳爪添加上去 注:下图配8mm螺丝3颗Step 13: 调试和故障排查 机械臂到此安装完毕,接下来需要接相应的控制板或者舵机驱动器。 Step 14: 机械臂控制板 MeArm Kit控制板请点击这里本文来自http://tieba.baidu.com/mo/q/checkurl?url=http%3A%2F%2Fwww.7gp.cn%2Findex.php%2Farchives%2F242&urlrefer=d6c252c1d775ecca81524258db415059
树莓派/Arduino+机械臂+16路PWM舵机驱动 部分资料转摘来源:http://tieba.baidu.com/mo/q/checkurl?url=http%3A%2F%2Fwww.7gp.cn%2Findex.php%2Farchives%2F217&urlrefer=2e8e5c5acca6fd0e312a29eff9737fef用一个16路PWM舵机驱动板,利用Arduino或树莓派通过PWM舵机驱动板来控制机械臂。 需要的舵机驱动板如图所示:在meArm机械臂项目中,把舵机驱动板的16路分为4个区块,每个区块连接4个舵机(对应机械臂的四个舵机)。区块编号从0开始(0~3)。示例一:用奇果派舵机驱动板控制机械臂 Arduino与PWMServo驱动板引脚接线方式: Arduino PWMServo GND GND 5V VCC & V+ A4 SDA A5 SCL 在本演示中,我们把机械臂舵机接到第)一个区块,从左到右分别接底部舵机、右侧(臂膀)舵机、左侧(肘部)舵机、爪子舵机。 连接方式如下: PWMServo序号 机械臂舵机 0 底部舵机 1 右侧(臂膀)舵机 2 左侧(肘部)舵机 3 爪子舵机 实例代码: #include “meArm_Adafruit.h” #include <Adafruit_PWMServoDriver.h> #include <Wire.h> meArm arm; void setup() { Serial.begin(9600); arm.begin(); //默认为第一区块,编号从0开始 } void loop() { //鼓掌—爪子多次开合 arm.openGripper(); arm.closeGripper(); arm.openGripper(); arm.closeGripper(); arm.openGripper(); delay(500); //转到左上方抓点东西 arm.gotoPoint(-80,100,140); arm.closeGripper(); //放到右前方去 arm.gotoPoint(70,200,10); arm.openGripper(); //回到起始点 arm.gotoPoint(0,100,50); delay(2000); } 演示二:通过游戏手柄控制机械臂 本示例需要有一对游戏摇杆,如图:配件连接说明: Arduino 摇杆1 摇杆2 PWMServo GND GND GND GND 5V VCC VCC VCC & V+ A0 HOR(X) A1 VER(Y) A2 HOR(X) A3 VER(Y) A4 SDA A5 SCL 舵机驱动与机械臂舵机连接说明: PWMServo序号 机械臂舵机 0 底部舵机 1 右侧(臂膀)舵机 2 左侧(肘部)舵机 3 爪子舵机 实例程序: #include “meArm_Adafruit.h” #include “Adafruit_PWMServoDriver.h” #include <Wire.h> int xdirPin = 0; int ydirPin = 1; int zdirPin = 3; int gdirPin = 2; meArm arm; void setup() { arm.begin(); } void loop() { float dx = map(analogRead(xdirPin), 0, 1023, -5.0, 5.0); float dy = map(analogRead(ydirPin), 0, 1023, 5.0, -5.0); float dz = map(analogRead(zdirPin), 0, 1023, 5.0, -5.0); float dg = map(analogRead(gdirPin), 0, 1023, 5.0, -5.0); if (abs(dx) < 1.5) dx = 0; if (abs(dy) < 1.5) dy = 0; if (abs(dz) < 1.5) dz = 0; if (!(dx == 0 && dy == 0 && dz == 0)) arm.goDirectlyTo(arm.getX() + dx, arm.getY() + dy, arm.getZ() + dz); if (dg < -3.0) arm.closeGripper(); else if (dg > 3.0) arm.openGripper(); delay(50); } 相关资料下载:下载中心
【作品展示】Arduino+机械臂+16路PWM舵机驱动 部分资料转摘来源:http://tieba.baidu.com/mo/q/checkurl?url=http%3A%2F%2Fwww.7gp.cn%2Findex.php%2Farchives%2F217&urlrefer=2e8e5c5acca6fd0e312a29eff9737fef需要的配件示例一:用奇果派舵机驱动板控制机械臂 Arduino与PWMServo驱动板引脚接线方式: Arduino PWMServo GND GND 5V VCC & V+ A4 SDA A5 SCL 在本演示中,我们把机械臂舵机接到第)一个区块,从左到右分别接底部舵机、右侧(臂膀)舵机、左侧(肘部)舵机、爪子舵机。 连接方式如下: PWMServo序号 机械臂舵机 0 底部舵机 1 右侧(臂膀)舵机 2 左侧(肘部)舵机 3 爪子舵机 实例代码: #include “meArm_Adafruit.h” #include <Adafruit_PWMServoDriver.h> #include <Wire.h> meArm arm; void setup() { Serial.begin(9600); arm.begin(); //默认为第一区块,编号从0开始 } void loop() { //鼓掌—爪子多次开合 arm.openGripper(); arm.closeGripper(); arm.openGripper(); arm.closeGripper(); arm.openGripper(); delay(500); //转到左上方抓点东西 arm.gotoPoint(-80,100,140); arm.closeGripper(); //放到右前方去 arm.gotoPoint(70,200,10); arm.openGripper(); //回到起始点 arm.gotoPoint(0,100,50); delay(2000); } 演示二:通过游戏手柄控制机械臂 本示例需要有一对游戏摇杆,如图:配件连接说明: Arduino 摇杆1 摇杆2 PWMServo GND GND GND GND 5V VCC VCC VCC & V+ A0 HOR(X) A1 VER(Y) A2 HOR(X) A3 VER(Y) A4 SDA A5 SCL 舵机驱动与机械臂舵机连接说明: PWMServo序号 机械臂舵机 0 底部舵机 1 右侧(臂膀)舵机 2 左侧(肘部)舵机 3 爪子舵机 实例程序: #include “meArm_Adafruit.h” #include “Adafruit_PWMServoDriver.h” #include <Wire.h> int xdirPin = 0; int ydirPin = 1; int zdirPin = 3; int gdirPin = 2; meArm arm; void setup() { arm.begin(); } void loop() { float dx = map(analogRead(xdirPin), 0, 1023, -5.0, 5.0); float dy = map(analogRead(ydirPin), 0, 1023, 5.0, -5.0); float dz = map(analogRead(zdirPin), 0, 1023, 5.0, -5.0); float dg = map(analogRead(gdirPin), 0, 1023, 5.0, -5.0); if (abs(dx) < 1.5) dx = 0; if (abs(dy) < 1.5) dy = 0; if (abs(dz) < 1.5) dz = 0; if (!(dx == 0 && dy == 0 && dz == 0)) arm.goDirectlyTo(arm.getX() + dx, arm.getY() + dy, arm.getZ() + dz); if (dg < -3.0) arm.closeGripper(); else if (dg > 3.0) arm.openGripper(); delay(50); } 相关资料下载:下载中心
支持Brickpi晒作品了 自己用PCB板子做的Brickpi,拿出来晒一下 还有多余的板子丢淘宝上了,有需要的上淘宝淘去吧
树莓派扩展板brickpi的大象机器人 树莓派玩到后来都不知道玩什么了,无意间淘宝淘到的Brickpi还是挺好玩的,来晒晒作品了
【arduino】WIFI控制的乐高机器大象 网上淘了一个Brickpi,花了一整天时间搭建的乐高机器大象,出来秀一下。树莓派的新玩法啊~~~
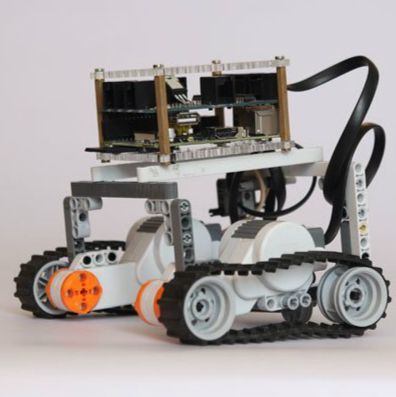
乐高EV3+BrickPi搭建的坦克小车 玩EV3也有一段时间了,EV3的功能还是很强大的,主机刷机后可以用熟悉的JAVA语言编程,遗憾的是WIFI和摄像头方面没有很好的支持。后来就找到了BrickPi这个东西。闲话不说了,直接上图吧(淘宝上买的套件)
1
下一页